

通知设置 新通知
军工体系企业
laoguo 发表了文章 • 0 个评论 • 4279 次浏览 • 2024-01-26 10:06
中国航空工业第一集团公司
112厂:沈阳飞机工业集团。156项之一。
113厂:西安航空动力控制工程有限公司/西安远东机械制造公司。156项之一。
114厂:庆安集团。156项之一。西安。
115厂:陕西秦岭航空电气公司。156项之一。兴平。
117厂:沈阳兴华电器制造公司。132厂:成都飞机工业集团。172厂:西安飞机工业集团。
212厂:宝成通用电子公司:宝鸡。156项之一。410厂:沈阳黎明发动机制造公司。156项之一。430厂:西安航空发动机集团。511厂:金城集团。南京
514厂:华兴航空机轮公司。156项之一。兴平。上海航空工业集团:含上海飞机制造厂、上海飞机研究所(640所)、上海航空发动机制造厂、上海航空电器厂(118厂)。
011基地:贵州航空工业集团:安顺。含龙岩(150厂)、双阳(162厂)、云马(130厂)飞机制造厂和黎阳航空发动机制造公司(460厂)。以上为大型企业。
111厂为航天沈阳新光厂,119厂为航天沈阳新乐厂。江汉航空救生装备工业公司:襄樊。148厂:红原航空铸造工业公司。三原。
158厂:洛阳南峰航空精密机电公司/洛阳航空电器厂。
161厂:成都航空仪表公司。164厂:皖安机械厂。
171厂:苏州长风机械有限公司。221厂:太原航空仪表公司。
232厂:北京青云航空仪表公司。351厂:江淮航空仪表厂。合肥。
5704厂:双吉机械厂:吉林机场。飞机修理厂。5711厂:龙岗机械厂:柳河机场。5716厂:晋翔机械厂:晋城机场。
成都太平寺机场5701工厂、武功机场5702工厂、上海大场机场5703工厂、吉林机场5704工厂、沈阳5705工厂、大连5706工厂、遵义5707工厂、贵阳磊庄机场5708工厂、长沙5712工厂、谷城5713工厂、洛阳5715工厂、桂林5718工厂、芜湖5720工厂、石家庄5721工厂等等为空军飞机修理厂,几乎每个军用机场一个修理厂,其中有些厂隶属于航空工业一、二集团。
中国航空工业第二集团公司
120厂:哈尔滨东安发动机集团。156项之一。122厂:哈尔滨飞机工业集团。156项之一。182厂:陕西飞机制造厂:城固。
242厂:兰州飞控仪器总厂。156项之一。
320厂:南昌航空工业集团(320厂与512厂合并)。156项之一。
322厂:宏图飞机制造厂:荆门。
331厂:南方航空动力机械公司:株洲。156项之一。
372厂:昌河飞机工业集团:景德镇。420厂:成都发动机集团。
012基地:汉中航空工业集团。
以上为大型企业。
013基地:湖南航空工业局。新航机械公司:新乡。含平原机器厂(116厂)等四个厂。
105厂:天津航空机电公司。
124厂:郑州新卫飞机设备公司。125厂:北京曙光电机厂。
133厂:长春航空机载设备公司。
135厂:万里机电总厂:兰州。
174厂:四川航空液压机构厂:广汉。
181厂:武汉仪表厂。
205厂:泛华航空仪表电器厂:雅安。
241厂:川江仪器厂:雅安。
370厂:常州兰翔机械总厂。
382厂:常州飞机制造厂。
503厂:北京长空机械公司。
513厂:南京宏光空降装备厂。
522厂:石家庄飞机制造公司。
542厂:保定向阳精密机械厂。
550厂:保定螺旋桨制造厂。
570厂:三江机械厂:宜宾。
3347厂:景德镇航空锻铸公司。
3207厂:川西机器厂:雅安。3357厂:徐州航空压铸厂。
3337厂:青岛前哨精密机械公司。
中国航天科工集团。
航天二院:对外称防御技术研究院/长峰机电技术研究设计院。北京。
航天三院:对外称飞航技术研究院/海鹰机电技术研究设计院。北京。(含1964年成立第七机械工业部时从兵器部划归的558厂。)
航天六院:对外称固体火箭发动机研究院/河西化工机械公司。呼和浩特。
航天七院:对外称建筑设计研究院。
北京061基地:对外称江南航天集团。遵义。
066基地:对外称三江航天集团。远安-孝感。
以上为六大院。
111厂:新光机械厂,对外称沈阳航天新光集团。发动机生产。156项之一。1964年成立第七机械工业部时从划归。
119厂:新乐机械厂:沈阳。1964年成立第七机械工业部时从航空部划归。
139厂:新新机械厂:沈阳。1964年成立第七机械工业部时从航空部划归。(同以上3个厂从航空部划入的还有165厂一桂林航空电器公司,现属航天时代电子仪器公司)
719厂:新兴仪器厂:对外称成都航天通讯设备公司。1964年成立第七机械工业部时从电子部划归。同时从电子部划归的还有786厂一黄河机器厂和289厂一巴山仪器厂(现属航天时代电子仪器公司)。
349厂:风华机械厂:对外称哈尔滨航天风华科技公司。1964年成立第七机械工业部时从兵器部423厂(松江机械厂)分出成立。
307厂:晨光机器厂:对外称南京晨光集团有限责任公司。原金陵机器厂。1964年成立第七机械工业部时从兵器部划归。一同划入的还有北京547厂(?后搬迁到张家口即燕兴机械厂,又划回兵器部)、
801厂:长虹机器厂。对外称柳州长虹机器制造公司。
以上为七大厂。
068基地:对外称湖南航天管理局。武冈-长沙。
云南航天工业总公司。昆明。
河南航天工业总公司。郑州。
以上为三大区域性公司。
中国航天科技集团。
航天一院:对外称运载火箭技术研究院。北京。156项之一。其519厂(清华机械厂,1964年成立第七机械工业部时从兵器部划归)在长治。
航天四院:对外称化学航天动力技术研究院。西安。
航天五院:对外称空间技术研究院。北京。
航天六院:067基地。对外称航天推进技术研究院。凤县-西安。
航天七院:062基地。对外称四川航天工业总公司。万源-成都。
航天八院:对外称上海航天技术研究院/上海航天管理局。
航天九院:对外称基础电子技术研究院。北京。其771所(西安微电子技术研究所)在西安临潼。时代电子公司:曾用过航天十院、对外称导航技术研究院的名称。含上海科学仪器厂(即上海空间电子设备研究所,原属五院)、西安微电子技术研究所771所、重庆巴山仪器厂、桂林航空电器公司等。
浓度单位ppm、ppb和ppt详解
laoguo 发表了文章 • 0 个评论 • 1053 次浏览 • 2024-01-25 14:59
什么是ppm,ppb,ppt?
ppm,全称为"parts per million",中文指百万分之一。表示在总量为一百万份的混合物中,有多少份是我们需要关注的物质。换句话说,1ppm等于1/1,000,000。
ppb,全称为"parts per billion",中文指十亿分之一。表示在总量为10亿份的混合物中,有多少份是需要关注的物质。换句话说,1ppb等于1/1,000,000,000。
ppt,全称为 "parts per trillion",中文指万亿分之一。表示在总量为1,000,000,000,000(一万亿)份的混合物中,有多少份是我们需要关注的物质。换句话说,1ppt 等于 1/1,000,000,000,000。
上述三种微量的浓度单位均是无量纲量,可以用来定义溶液的浓度和气体浓度,我们可以用它们来表示质量百分浓度,摩尔浓度,质量-体积浓度等。
与其他单位的换算:
1ppm=1mg/kg 1ppm=1mg/L 1ppm= 0.0001%
1 ppb = 1 µg/kg 1ppb=1ug/L
1 ppt = 1 ng/kg 1 ppt =1ng/L
1ppm=1000ppb=1000000ppt
Honeywell SDX系列压力传感器替代方案
laoguo 发表了文章 • 0 个评论 • 306 次浏览 • 2024-01-25 08:33

SDX005IND4 5 inH2O Differential MLDX-L05D-DX01-N
SDX010IND4 10 inH2O Differential MLDX-L10D-DX01-N
SDX01D4 1 psi Differential MLDX-001D-DX01-N
SDX05D4 5 psi Differential MLDX-005D-DX01-N
SDX15D4 15 psi Differential MLDX-015D-DX01-N
SDX15A4 15 psi Absolute MLDX-015A-DX01-N
SDX30D4 30 psi Differential MLDX-030D-DX01-N
SDX30A4 30 psi Absolute MLDX-030A-DX01-N
SDX100D4 100 psi Differential MLDX-100D-DX01-N
SDX100A4 100 psi Absolute MLDX-100A-DX01-N
单片机ADC采样常用的十大滤波算法
laoguo 发表了文章 • 0 个评论 • 2429 次浏览 • 2022-11-16 09:16
假定从 8 位 ADC 中读取数据(如果是更高位的 ADC 可定义数据类型为 int) ,子程序为get_ad();
一.限幅滤波法(又称程序判断滤波法)
A.方法:
根据经验判断,确定两次采样允许的最大偏差值(设为 A)
每次检测到新值时判断:
如果本次值与上次值之差<=A,则本次值有效
如果本次值与上次值之差>A,则本次值无效,放弃本次值,用上次值代替本次数值
B.优点
能有效克服因偶然因素引起的脉冲干扰
C.缺点
无法抑制那种周期性的干扰
平滑度差
D.示例
#define A 10
char value;
char filter()
{
char new_value;
new_value = get_ad();
if (( new_value - value > A ) || ( value - new_value > A )
return value;
return new_value;
}
二.中位值滤波法
A.方法:
连续采样 N 次(N 取奇数)
把 N 次采样值按大小排列
取中间值为本次有效值
B.优点:
能有效克服因偶然因素引起的波动干扰
对温度、液位的变化缓慢的被测参数有良好的滤波效果
C.缺点:
对流量、速度等快速变化的参数不宜
D.示例
/* N 值可根据实际情况调整排序采用冒泡法*/
#define N 11
char filter()
{
char value_buf[N];
char count,i,j,temp;
for ( count = 0; count < N; count++)
{
value_buf[count] = get_ad();
delay();
}
for (j = 0; j < N-1; j++)
{
for (i = 0; i < N - j; i++)
{
if ( value_buf > value_buf[i + 1] )
{
temp = value_buf;
value_buf = value_buf[i + 1];
value_buf[i + 1] = temp;
}
}
}
return value_buf[(N-1)/2];
}
三.算数平均滤波法
A.方法:
连续取 N 个采样值进行算术平均运算
N 值较大时:信号平滑度较高,但灵敏度较低
N 值较小时:信号平滑度较低,但灵敏度较高
N 值的选取:一般流量, N=12;压力: N=4
B.优点:
适用于对一般具有随机干扰的信号进行滤波这样信号的特点是有一个平均值,信号在某一数值范围附近上下波动
C.缺点:
对于测量速度较慢或要求数据计算速度较快的实时控制不适用比较浪费 RAM
D.示例
#define N 12
char filter()
{
int sum = 0;
for ( count=0;count<N;count++)
{
sum + = get_ad();
delay();
}
return (char)(sum/N);
}
四.递推平均滤波法(又称滑动平均滤波法)
A.方法:
把连续取 N 个采样值看成一个队列
队列的长度固定为 N
每次采样到一个新数据放入队尾,并扔掉原来队首的一次数据.(先进先出原则)
把队列中的 N 个数据进行算术平均运算,就可获得新的滤波结果
N 值的选取:流量, N=12;压力: N=4;液面, N=4~12;温度, N=1~4
B.优点:
对周期性干扰有良好的抑制作用,平滑度高
适用于高频振荡的系统
C.缺点:
灵敏度低
对偶然出现的脉冲性干扰的抑制作用较差
不易消除由于脉冲干扰所引起的采样值偏差
不适用于脉冲干扰比较严重的场合
比较浪费 RAM
D.示例
char value_buff[N];
char i=0;
char filter()
{
char count;
int sum=0;
value_buff[i++]=get_data();
if(i==N)
i=0;
for(count=0;count<N;count++)
sum+=value_buff[count];
return (char)(sum/N);
}
五.中位值平均滤波法(又称防脉冲干扰平均滤波法)
A.方法:
相当于“中位值滤波法”+“算术平均滤波法”
连续采样 N 个数据,去掉一个最大值和一个最小值
然后计算 N-2 个数据的算术平均值
N 值的选取: 3~14
B.优点:
融合了两种滤波法的优点
对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差
C.缺点:
测量速度较慢,和算术平均滤波法一样
比较浪费 RAM
D.示例
#define N 12
char filter()
{
char count,i,j;
char value_buf[N];
int sum=0;
for (count=0;count<N;count++)
{
value_buf[count] = get_ad();
delay();
}
for (j=0;j<N-1;j++)
{
for (i=0;i<N-j;i++)
{
if ( value_buf>value_buf[i+1] )
{
temp = value_buf;
value_buf = value_buf[i+1];
value_buf[i+1] = temp;
}
}
}
for(count=1;count<N-1;count++)
sum += value[count];
return (char)(sum/(N-2));
}
六.限幅平均滤波法
A.方法:
相当于“限幅滤波法”+“递推平均滤波法”
每次采样到的新数据先进行限幅处理,
再送入队列进行递推平均滤波处理
B.优点:
融合了两种滤波法的优点
对于偶然出现的脉冲性干扰, 可消除由于脉冲干扰所引起的采样值偏差
C.缺点:
比较浪费 RAM
D.示例
略 参考子程序 1、 3
七.一阶滞后滤波法
A.方法:
取 a=0~1
本次滤波结果=(1-a) 本次采样值+a上次滤波结果
B.优点:
对周期性干扰具有良好的抑制作用
适用于波动频率较高的场合
C.缺点:
相位滞后,灵敏度低
滞后程度取决于 a 值大小
不能消除滤波频率高于采样频率的 1/2 的干扰信号
D.示例
/* 为加快程序处理速度假定基数为 100, a=0~100 */
#define a 50
char value;
char filter()
{
char new_value;
new_value = get_ad();
return (100-a)*value + a*new_value;
}
八.加权递推平均滤波法
A.方法:
是对递推平均滤波法的改进,即不同时刻的数据加以不同的权
通常是,越接近现时刻的数据,权取得越大。
给予新采样值的权系数越大,则灵敏度越高,但信号平滑度越低
B.优点:
适用于有较大纯滞后时间常数的对象
和采样周期较短的系统
C.缺点:
对于纯滞后时间常数较小,采样周期较长,变化缓慢的信号
不能迅速反应系统当前所受干扰的严重程度,滤波效果差
D.示例
/* coe 数组为加权系数表,存在程序存储区。 */
#define N 12
char code coe[N] = {1,2,3,4,5,6,7,8,9,10,11,12};
char code sum_coe = 1+2+3+4+5+6+7+8+9+10+11+12;
char filter()
{
char count;
char value_buf[N];
int sum=0;
for (count=0,count<N;count++)
{
value_buf[count] = get_ad();
delay();
}
for (count=0,count<N;count++)
sum += value_buf[count]*coe[count];
return (char)(sum/sum_coe);
}
九.消抖滤波法
A.方法:
设置一个滤波计数器
将每次采样值与当前有效值比较:
如果采样值=当前有效值,则计数器清零
如果采样值<>当前有效值,则计数器+1,并判断计数器是否>=上限 N(溢出)
如果计数器溢出,则将本次值替换当前有效值,并清计数器
B.优点:
对于变化缓慢的被测参数有较好的滤波效果,
可避免在临界值附近控制器的反复开/关跳动或显示器上数值抖动
C.缺点:
对于快速变化的参数不宜
如果在计数器溢出的那一次采样到的值恰好是干扰值,则会将干扰值当作有效值导入系统。
D.示例
#define N 12
char filter()
{
char count=0;
char new_value;
new_value = get_ad();
while (value !=new_value);
{
count++;
if (count>=N)
return new_value;
delay();
new_value = get_ad();
}
return value;
}
十.限幅消抖滤波法
A.方法:
相当于“限幅滤波法”+“消抖滤波法”
先限幅,后消抖
B.优点:
继承了“限幅”和“消抖”的优点
改进了“消抖滤波法”中的某些缺陷,避免将干扰值导入系统
C.缺点:
对于快速变化的参数不宜
D.示例
参考 1、 9
————————————————
原文链接:https://blog.csdn.net/u011852186/article/details/126484032
关于一款All sensor 的压力传感器ELVH的引脚定义问题
laoguo 回复了问题 • 1 人关注 • 2 个回复 • 1218 次浏览 • 2022-10-15 18:08
双极霍尔元件原理
laoguo 发表了文章 • 0 个评论 • 966 次浏览 • 2022-09-21 07:47
双极霍尔需要两个磁极分别控制高低电平,利用磁场NS极交替来输出信号。如S极靠近时输出低电平,N极靠近时输出高电平。如果磁场被移除,则是随机输出,有可能是打开,也有可能是关闭。

双极霍尔有一种特殊形式叫锁存霍尔或锁定霍尔:如S极靠近时开启,磁场离开继续保持开启;当靠近N极时才会关闭,磁场移除后继续保持关闭状态,直到下次磁场改变,这种保持上次状态的特性即锁存特性,这种类型的霍尔就是双极锁存型霍尔.
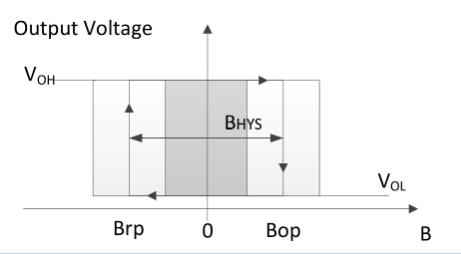
双极性霍尔传感器设计为灵敏开关。双极型开关有一致的迟滞性,但是,不同的器件对发生在正极或者负极的开关点的范围是不同的。因为需要改变磁场的极性,来确保开关点的切换,并且需要一致的迟滞性来确保周期,所以需要磁信号改变幅度ΔB,故而这些器件紧密排列,南北两极交替使用。
双极霍尔一向使用于电机换相或者计圈数应用场景!最常见的是霍尼韦尔的SS41F,应用于电动自行车轮毂电机上。
