

通知设置 新通知
压力传感器常用术语
laoguo 发表了文章 • 0 个评论 • 681 次浏览 • 2021-07-07 15:47
下面是压力传感器选型时常用的术语:
标准压:以大气压为标准表示的压力大小,大于大气压的叫正压;小于大气压的叫负压。
绝对压:以绝对真空为标准表示的压力大小。
相对压:对比较对象(标准压)而言的压力大小。
大气压:指大气压力。标准大气压(1atm)相当于高度为760mm水银柱的压力。
真空:指低于大气压的压力状态。1Torr=1/760气压(atm)。

检测压力范围:指传感器的适应压力范围。
可承受压力:当恢复到检测压力时,其性能不下降的可承受压力。
往返精度(ON/OFF输出):当一定温度(23°C)下,当增加、减少压力时、用检测压力的全标度值去除输出进行反转的压力值而得到的动作点的压力变动值。

精度:在一定温度(23°C)下,当加零压力和额定压力时,用全标度值去除偏离输出电流规定值(4mA、20mA)的值而得到的值。单位用%FS表示。
线性:模拟输出对检测压力呈线性变化,但与理想直线相比有偏差。用对全标度值来说百分数来表示这种偏差的值叫线性。
磁滞(线性):用零电压和额定电压在输出电流(或电压)值间画出理想直线,把电流(或电压)值与理想电流(或电压)值之差作为误差求出来,再求出压力上升时和下降时的误差值。用全标度的电流(或电压)值去除上述差的绝对值的最大值所得的值即为磁滞。单位用%FS表示。
磁滞(ON/OFF输出):用压力的全标度值去除输出ON点压力与OFF点压力之差所得的值既是磁滞。
非腐蚀性气体:指空气中含有的物质(氮、二氧化碳等)与惰性气体(氩、氖等)
如何用加速度计提高倾角测量精度
laoguo 发表了文章 • 0 个评论 • 610 次浏览 • 2021-07-02 11:30
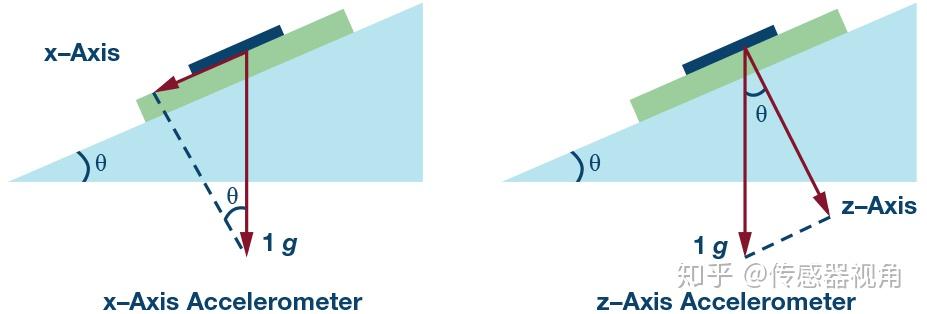
本文旨在探讨如何用组合器件一类的加速度计提高倾角测量的精度。在乘用车上,电动驻车制动器(EPB)被用于使汽车在平坦的分级道路上保持静止。这是通过用一个单轴或双轴加速度计测量倾角来实现的。一般做法是将一个X轴/Y轴或Z轴低g加速度计装在EPB控制单元中一个专门的模块中。现在,越来越多的汽车配有ESC(电子稳定控制)功能,在单个芯片中集成了组合式低g加速度计和陀螺仪。这样做是为了防止汽车侧滑和翻车;如今,ESC功能已经成为世界各国或地区法律的强制要求。如果通过组合器件(单芯片、组合式加速度计和陀螺仪)实现倾角测量,则不必在车上安装一个独立的EPB模块,结果可以大幅降低汽车的成本。由于组合器件通常用于ESC,所以并未针对倾角检测优化,并且通过组合器件测量倾角时,测量精度有时无法达到要求。由于组合器件是XY轴或XYZ轴,所以通常用X轴进行倾角测量,EPB模块中的部分传统型低-g加速度计使用的是Z轴,因为它是垂直安装在发动机舱里的。检测轴应该与重力垂直,才能取得更高的精度——我们稍后会讨论这一点。
对于汽车中的倾角测量,评估精度是非常重要的。不妨想像,您的车停在绝对平坦的地面,因此,加速度计计算的倾角应该是0°。如果您的车停在斜坡上,就应该精确地检测出倾角,以便正确地激活刹车系统。
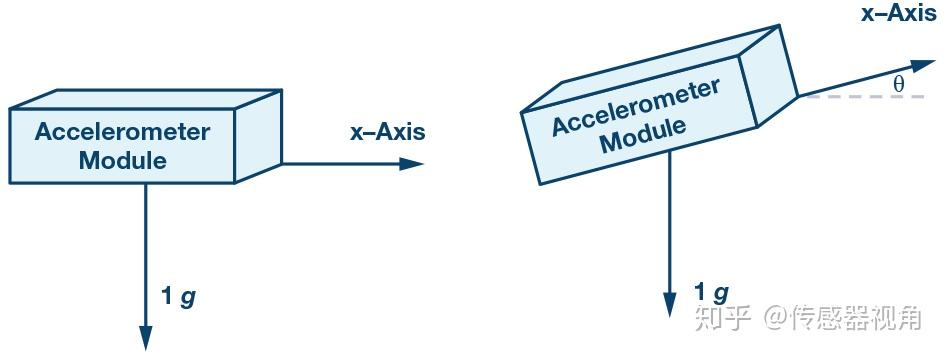

因此

其中:
AOUT 为加速度计的输出,单位为g。
θ 为斜坡的倾角,单位为度。
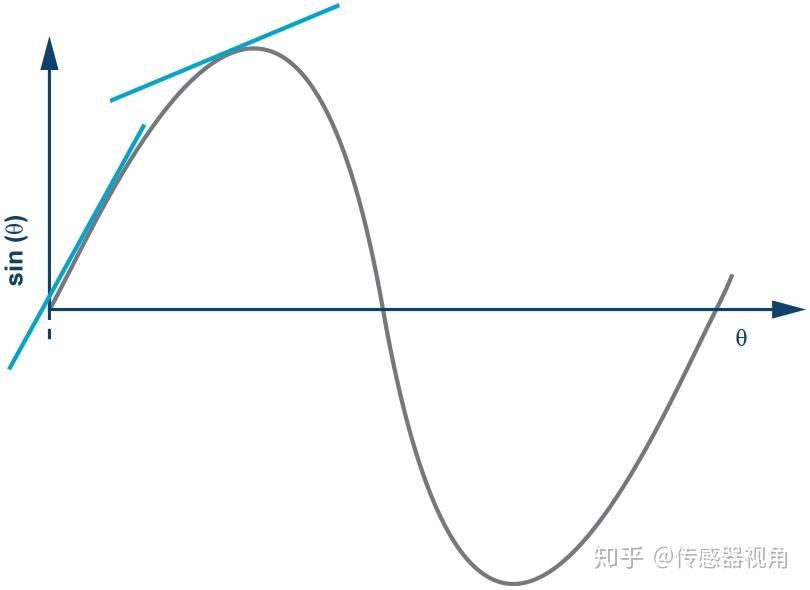
由于sin θ是一个非线性函数,所以,AOUT与θ之间的关系是非线性 的,在接近零时其线性度处于最佳状态,即其此时具有最佳的测量精度。随着θ的增大,测量精度下降。这正是检测轴应与重力垂直的原因,因为道路坡度将接近零
对于汽车倾角测量,不必在全斜坡坡度的条件下考虑系统。现实世界中,道路上的绝大多数斜坡坡度不会超过30°。我们只需要分析在±30°的范围内分析贡献因素的精度即可。
影响系统级测量精度的贡献因素有多个:
灵敏度误差和初始绝对失调
非线性度
与初始绝对失调的总失调变化
噪声
灵敏度误差和初始绝对失调
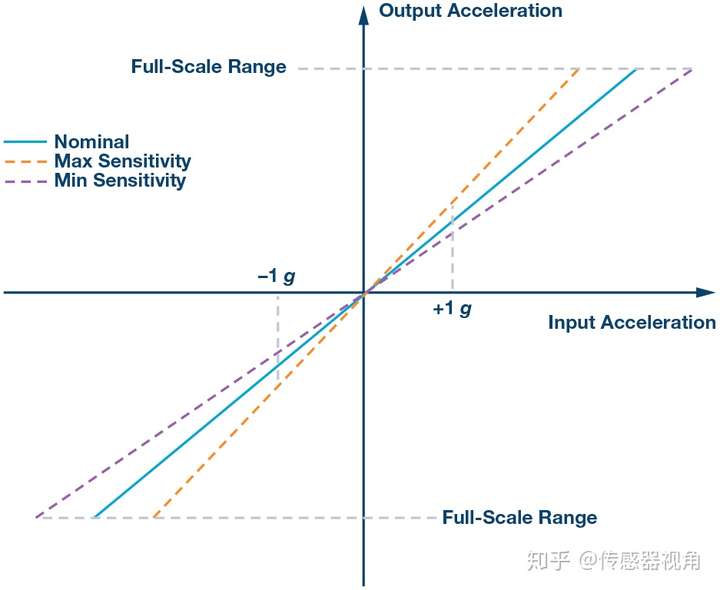
灵敏度误差
灵敏度是对输入-输出测得的传递函数的斜率,通常为+1g和–1g。灵敏度误差为器件间的灵敏度偏差。例如,有些加速度计的最大灵敏度为3%。
初始绝对失调
范围内的失调约为25°C;例如,在模块制造完成后立即测量的值为25°C ± 5°C。初始绝对失调表示大量器件的实测偏移值的标准差。
两点校准
对于倾角测量应用,两个主要的误差来自失调误差和灵敏度误差。这两种误差会导致不可接受的检测结果,因此不得忽略。如果我们希望消除这些部分误差,则应对加速度输出进行校准。一般地,要对倾角测量的失调和灵敏度进行一次校准。若要考虑失调和灵敏度误差,则加速度计输入与输出的关系为:

其中:
A输出 为失调误差,单位为g。
增益为加速度计的增益,理想值为1。
A实际为施加于加速度计的实际加速度,单位为g。
有两种基本校准技术;其中一种是单点校准。这种校准的具体做法是在加速度计上施加一个0g场,然后测量输出。这类校准只能用于校准失调误差,不能校准增益误差。然后,从实际输出值中减去0g场里的输出结果,消除失调误差。这种校准方法非常简单,但精度不足,因为仍然存在灵敏度误差。另一种方法是1g翻转校准,在+1g和–1g时采用两点校准,并在每个+1g和–1g场内按照以下公式测量加速度输出:

其中,失调A失调的单位为g。
以这两点信息为基础,可以按照以下方法解出失调和增益:

其中,+1g和 1g测量值、A+1g和A–1g均以g为单位。
经过这一次校准以后,可以用该等式计算实际加速度,每次都会消除失调误差和灵敏度误差。

其中,A失调和A输出以g为单位。
非线性度
器件的非线性度为测得加速度(AMEA)与理想线性输出加速度(AFIT)之间的最大偏差。加速度测量数据集应包括加速度计的满量程范围。其测量方式为Max(|AMEA – AFIT|)。
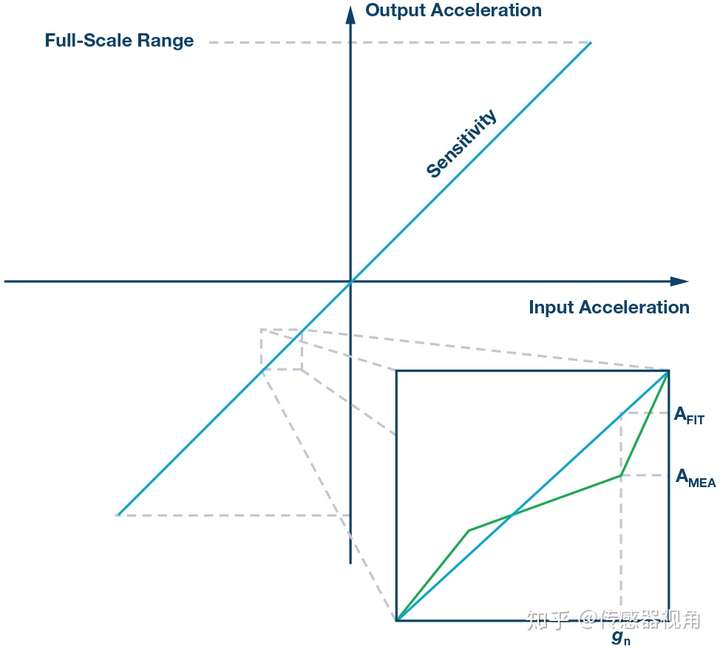
其中:
AMEA为给定gn下的测得加速度。
AFIT 为给定gn下的预测加速度。
多数加速度计或组合器件在给定输入加速度计范围内均存在非线性——例如,30 mg ± 2g的范围。对于倾角测量应用,输入坡道斜率在±30°以内,这意味着输出加速度范围在±500 mg (±1g× sin 30°)以内,所以应重新评估该范围内的非线性度。由于非线性度在整个输入范围内是非线性的,所以,很难准确地量化评估这部分误差。然而,由于该器件的数据手册通常都很保守,线性度为30 mg,输入范围为±2g,用10 mg计算±500 mg范围内的误差更合理些。
与初始绝对失调的总失调变化
与初始绝对失调的总失调变化为温度、应力和老化效应导致的失调的最大偏差。该偏差是相对于给定器件的初始绝对失调进行测量的。这是精度总误差的主要贡献因素。
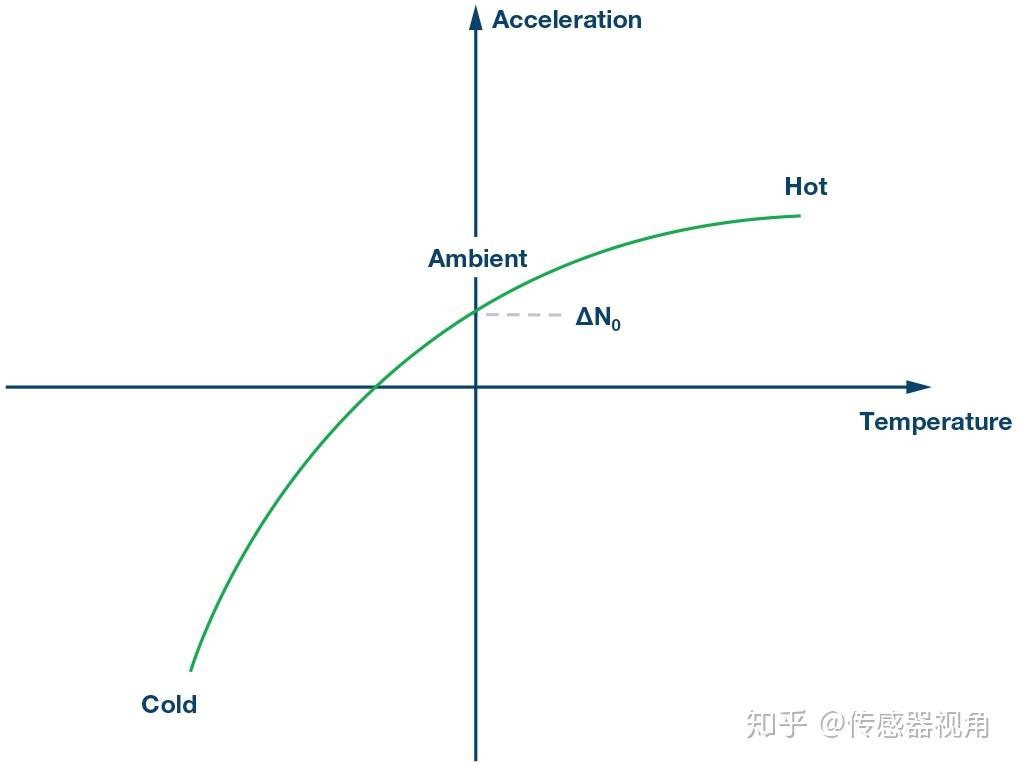
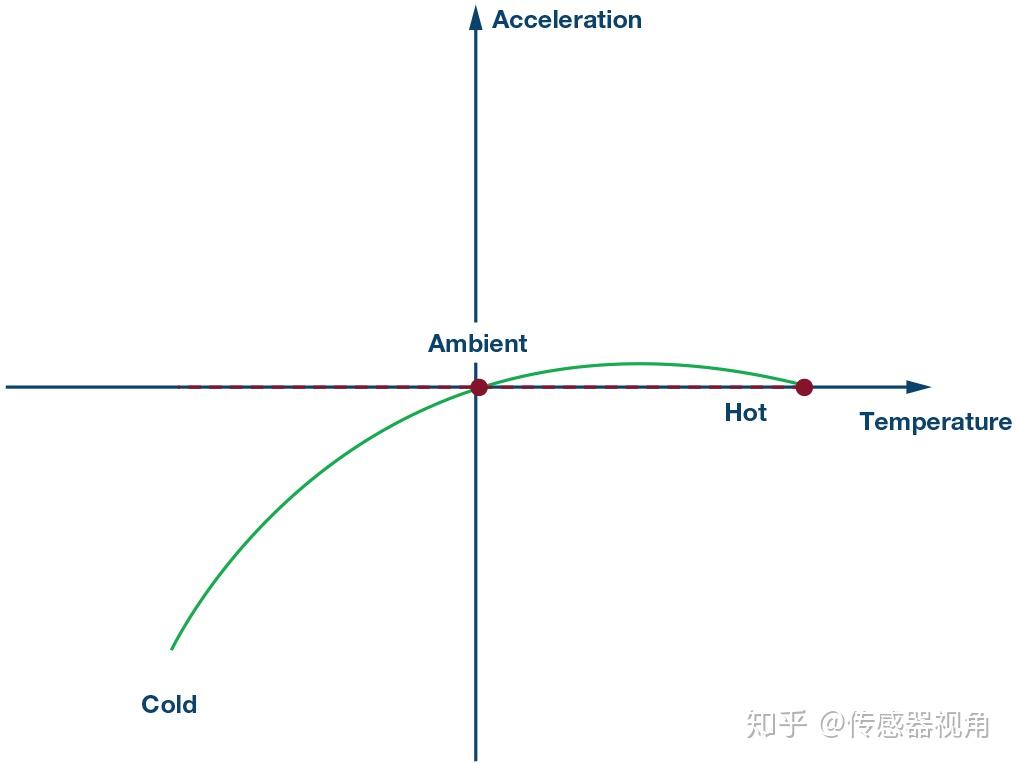
在温度、应力、老化等所有这些因素中,变化与温度在总失调变化中占比很大。一般地,变化与温度曲线是二阶曲线,通常为旋转抛物线。为了消除这部分误差,可以在系统级执行三点校准。对于给定器件,可按下列步骤校准输出失调随温度的变化值。
第1步:
使器件的输出响应以某个 ∆N0值偏移。温度校准流程的第一步是 消除环境温度下的失调。
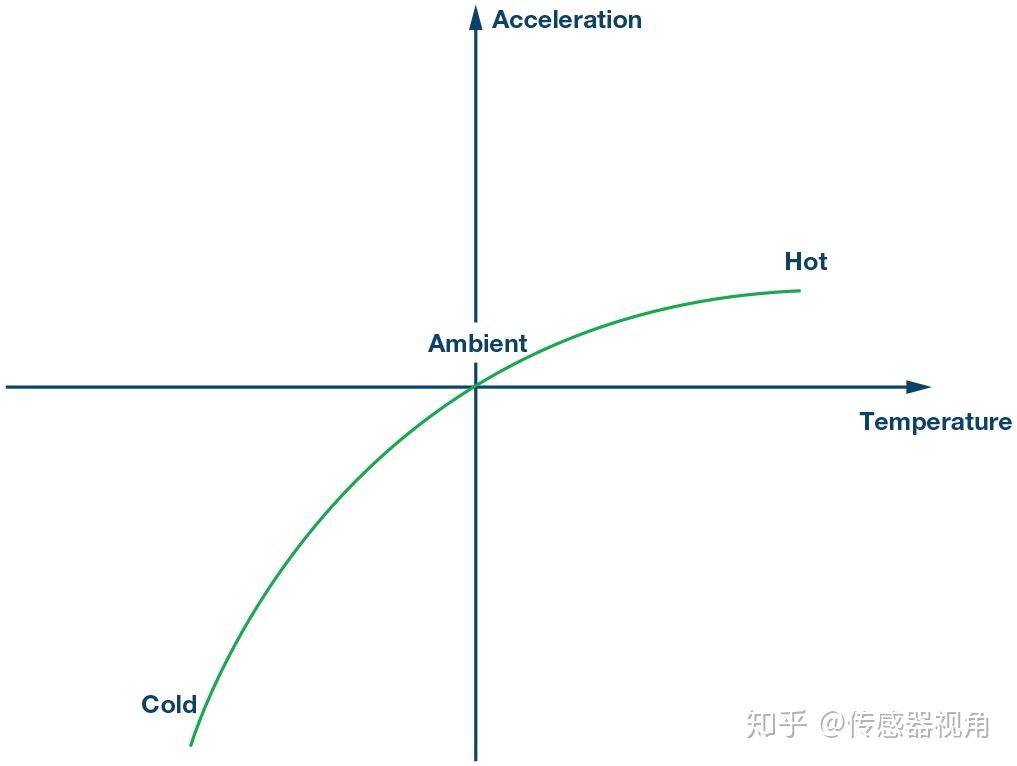
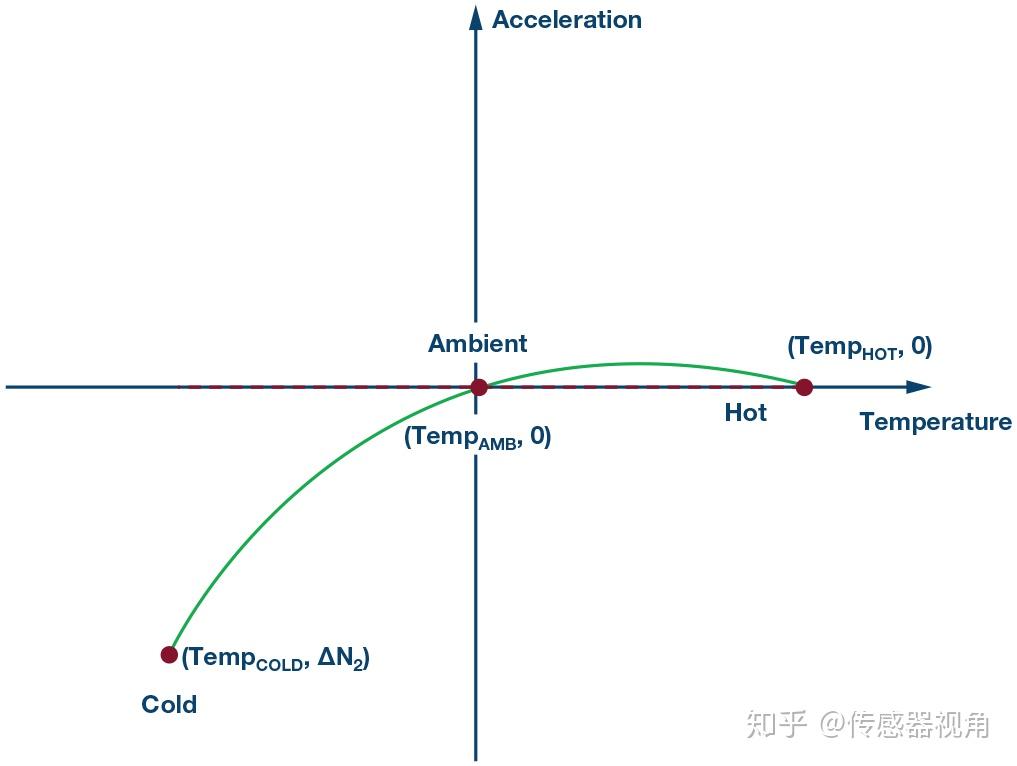
第2步:
接下来,在高温下测试器件,用获得的新信息生成失调校正线性公式。
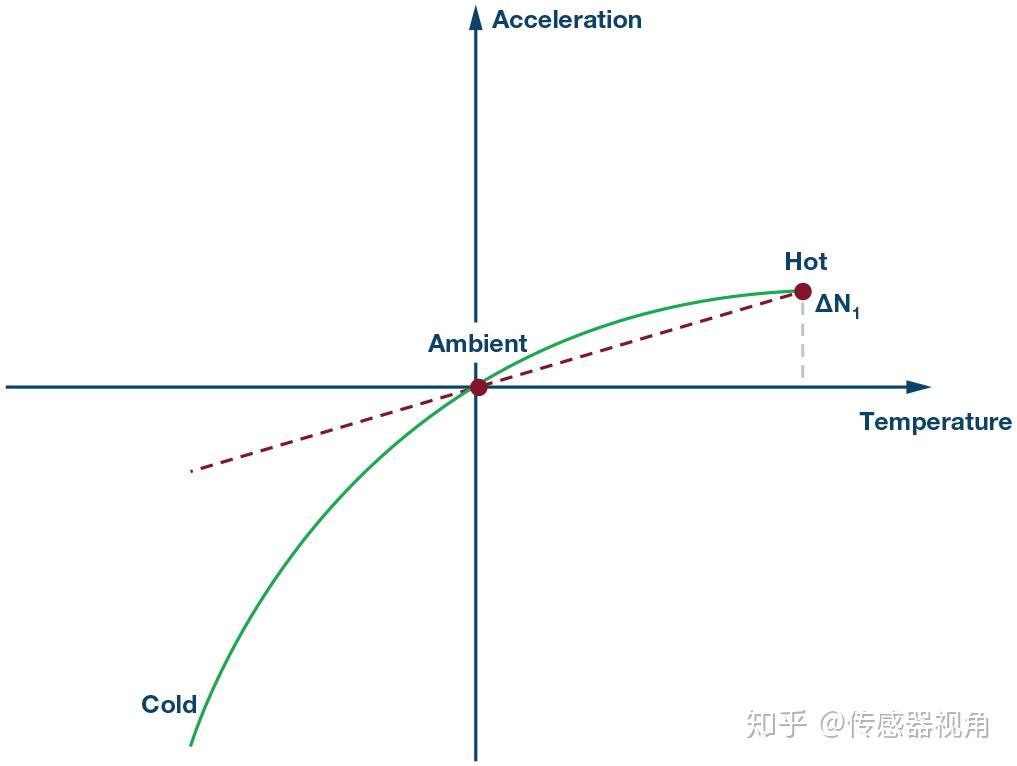
第3步:
给现有公式添加一个二阶分量,校正失调剩余部分。设二阶曲线遵循以下公式:

这是二阶抛物线公式,已经通过第1步和第2步消除了旋转分量。
在该公式中,该二阶抛物线有三个解:

然后,我们可以得到温度系数 a, b, c.
有关∆N0, ∆N1, ∆N2, a, b, c 的所有温度系数信息应该存储在系统非易失性存储器中,同时需要一个板载温度传感器。系统会在每次上电后例行校准加速度计,确保消除失调随温度的变化值。
噪声
基于单个数据样本测量倾角不一定可靠。即使加速度计的噪声为零,倾角测量也是在汽车启动时测量的,所以,需要减小发动机、过往车辆或乘客在车上来回移动导致的任何振动。最好的办法是在不降至最低数据速率要求的条件下,在尽量长的时间内做数据平均。数据平均算法会减少rms噪声。
假如我们对噪声采样,结果可得到每个样本的方差

求一个随机变量的均值,获得以下方差,

由于噪声方差保持于σ2不变,

以上推导显示,对同一未校正噪声的n次实现求均值可使噪声功率减少n倍,并使rms噪声减少√n。
由于随机噪声受高斯分布影响,所以,rms噪声等于高斯分布的标准差。6σ以内的最小分布为97%。
例如,如果以1 kSPS的采样率对每100 ms的数据求均值,则最大rms噪声 = 0.4 mg,即是说如果以6σ作为与平均值的距离,则此时的峰值噪声仅为2.4 mg。
用于与rms值相乘的因数取决于器件要执行的任务的统计需求。例如,如果选择6作为因数(峰峰值噪声为6 × RMS_Noise),则算法在器件生命周期内要运行的次数会影响超过最差情况6 × RMS_Noise 的概率。可总结如下:

E为在生命周期内超过最差情况的预期次数,M为生命周期内的运行次数,r为超过最差情况的概率。基于此,我们可以通过乘以rms噪声评估出一个合理的因数。
小结
以ADI公司的ADXC1500/ADXC1501(组合式陀螺仪和2轴/3轴加速度 计)为例,所有误差贡献项均列于表1中,包括校准和不校准两种情况。我们可以假设,总失调变化为二次曲线,并且其在温度范围内的变化占总失调变化的80%。另外,以6为因数乘以最大rms噪声。
一个陀螺仪和一个三轴加速度计的单芯片集成方案可以实现多种新型应用,尤其是在汽车安全系统和工业自动化应用领域。为了设计更加可靠、高精度的汽车安全系统,例如,稳定的电子控制系统(ESC)和侧翻检测系统,尽量减少系统误差至关重要。汽车中已安装这些传统型底盘控制系统,包括防抱死制动系统、牵引控制和偏航控制系统。

TMR磁传感器简介
laoguo 发表了文章 • 0 个评论 • 2795 次浏览 • 2021-06-30 15:23
磁传感器广泛用于现代工业和电子产品中以感应磁场强度来测量电流、位置、方向等物理参数。在现有技术中,有许多不同类型的传感器用于测量磁场和其他参数,例如采用霍尔(Hall)元件,各向异性磁电阻(Anisotropic Magnetoresistance, AMR)元件或巨磁电阻(Giant Magnetoresistance, GMR)元件为敏感元件的磁传感器。
以霍尔元件为敏感元件的磁传感器通常使用聚磁环结构来放大磁场,提高霍尔输出灵敏度,从而增加了传感器的体积和重量,同时霍尔元件具有功耗大,线性度差的缺陷。AMR元件虽然其灵敏度比霍尔元件高很多,但是其线性范围窄,同时以AMR为敏感元件的磁传感器需要设置Set/Reset线圈对其进行预设/复位操作,造成其制造工艺的复杂,线圈结构的设置在增加尺寸的同时也增加了功耗。以GMR元件为敏感元件的磁传感器较之霍尔电流传感器有更高的灵敏度,但是其线性范围偏低。
TMR(Tunnel MagnetoResistance)元件是近年来开始工业应用的新型磁电阻效应传感器,其利用的是磁性多层膜材料的隧道磁电阻效应对磁场进行感应,比之前所发现并实际应用的AMR元件和GMR元件具有更大的电阻变化率。我们通常也用磁隧道结(Magnetic Tunnel Junction,MTJ)来代指TMR元件,MTJ元件相对于霍尔元件具有更好的温度稳定性,更高的灵敏度,更低的功耗,更好的线性度,不需要额外的聚磁环结构;相对于AMR元件具有更好的温度稳定性,更高的灵敏度,更宽的线性范围,不需要额外的set/reset线圈结构;相对于GMR元件具有更好的温度稳定性,更高的灵敏度,更低的功耗,更宽的线性范围。下图是四代磁传感技术原理图。

下表是霍尔元件、AMR元件、GMR元件以及TMR元件的技术参数对比,可以更清楚直观的看到各种技术的优劣。
技术 | 功耗(mA) | 尺寸 (mm) | 灵敏度 (mV/V/Oe) | 工作范围 (Oe) | 分辨率 (mOe) | 温度特性 (℃) |
Hall | 5~20 | 1×1 | 0.05 | 1~1000 | 500 | <150 |
AMR | 1~10 | 1×1 | 1 | 0.001~10 | 0.1 | <150 |
GMR | 1~10 | 2×2 | 3 | 0.1~30 | 2 | <150 |
TMR | 0.001~0.01 | 0.5×0.5 | 20 | 0.001~200 | 0.1 | <200 |

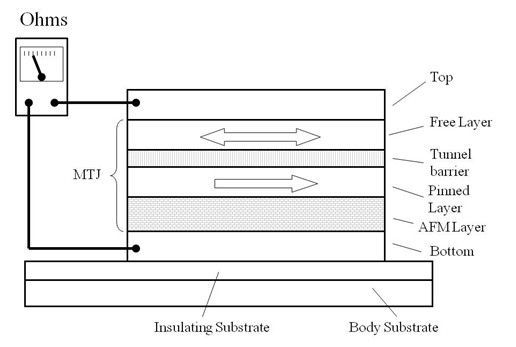
右图是一个MTJ元件的结构原理图。MTJ元件由钉扎层(Pinning Layer)、隧道势垒层(Tunnel Barrier)、自由层(Free Layer)构成。钉扎层由铁磁层(被钉扎层,Pinned Layer)和反铁磁层(AFM Layer)构成,铁磁层和反铁磁层之间的交换耦合作用决定了铁磁层的磁矩方向;隧道势垒层通常由MgO或Al2O3构成,位于铁磁层的上部。铁磁层位于隧道势垒层的上部。如图所示的箭头分别代表被钉扎层和自由层的磁矩方向。被钉扎层的磁矩在一定大小的磁场作用下是相对固定的,自由层的磁矩相对于被钉扎层的磁矩是相对自由且可旋转的,随外场的变化而发生翻转。各薄膜层的典型厚度为0.1 nm到100 nm之间。
底电极层(Bottom Conducting Layer)和顶电极层(Top Conducting Layer)直接与相关的反铁磁层和自由层电接触。电极层通常采用非磁性导电材料,能够携带电流输入欧姆计,欧姆计适用于已知的穿过整个隧道结的电流,并对电流(或电压)进行测量。通常情况下,隧道势垒层提供了器件的大多数电阻,约为1000欧姆,而所有导体的阻值约为10欧姆。底电极层位于绝缘基片(Insulating Layer)上方,绝缘基片要比底电极层要宽,且位于其他材料构成的底基片(Body Substrate)的上方。底基片的材料通常是硅、石英、耐热玻璃、GaAs、AlTiC或者是能够于晶圆集成的任何其他材料。硅由于其易于加工为集成电路(尽管磁性传感器不总是需要这种电路)成为最好的选择。

右图所示的是在理想情况下的MTJ元件的响应曲线。在理想状态下,磁电阻R随外场H的变化是完美的线性关系,同时没有磁滞(在实际情况下,磁电阻的响应曲线随外场变化具有滞后的现象,我们称之为磁滞。磁电阻的响应曲线为一个回路,通常作为应用的磁电阻材料的磁滞很小,在实际使用中可以看做一个完美的线性曲线)。在现实应用的传感器领域,由于磁传感设计的制约以及材料的缺陷,这条曲线会更弯曲。本发明涉及了传感器的设计、结构以及能够生产实施的工序,该传感器具有卓越的工作感应,在工作区域内同时具有高线性度、低磁滞、高灵敏度的特点(即磁电阻响应曲线斜率大)。
R-H曲线具有低阻态RL和高阻态RH。其高灵敏度的区域是在零场附近,传感器的工作区间位于零场附近,约为饱和场之间1/3的区域。响应曲线的斜率和传感器的灵敏度成正比。如图3所示,零场切线和低场切线以及高场切线相交于点(-Hs+Ho)和点(Hs+Ho),可以看出,响应曲线不是沿H = 0的点对称的。Ho是典型的偏移场。Ho值通常被称为“橘子皮效应(Orange-peel Coupling)”或“奈尔耦合(Néel Coupling)”,其典型值为1到40 Oe。其与磁电阻元件中铁磁性薄膜的结构和平整度有关,依赖于材料和制造工艺。Hs被定量地定义为线性区域的切线与正负饱和曲线的切线的交点对应的值,该值是在响应曲线相对于Ho点的不对称性消除的情况下所取的。图3中,白色箭头代表自由层磁矩方向,黑色箭头代表钉扎层磁矩方向,磁电阻响应曲线随自由层磁矩和被钉扎层磁矩之间角度的变化而变化:当自由层磁矩与钉扎层磁矩反平行时,曲线对应高阻态RH;当自由层磁矩与钉扎层磁矩平行时,曲线对应低阻态RL;当自由层磁矩与钉扎层磁矩垂直时,阻值是位于RL和RH之间的中间值,该区域是理想的线性磁传感器的“工作点”。
上图中的内插图是另一个磁电阻R与外场H的响应曲线图,该磁电阻沿传感器的法线旋转了180°。在同一外场H的作用下,该磁电阻的响应曲线与主图对应的磁电阻的响应曲线呈相反的变化趋势。主图对应的磁电阻和旋转180°设置的磁电阻可以构造电桥,这被证明比其他可能的方法输出值更大。
电桥可以用来改变磁电阻传感器的信号,使其输出电压便于被放大。这可以改变信号的噪声,取消共模信号,减少温漂或其他的不足。MTJ元件可以连接构成惠斯通电桥或其他电桥。
右图是一个典型的MTJ推挽半桥传感器结构。沿传感器的法线旋转180°排列的两个MTJ磁电阻构成了半桥结构,其具有3个外接焊盘(Contact-Pad),依次为:偏置电压(Vbias)、中心点VOUT以及接地点(GND),桥式电路可通过焊盘进行电连,稳恒电压Vbias施加于焊盘Vbias端和GND端。在同一外场H的作用下,一个磁电阻的阻值增加的同时另一个的阻值会随之降低,施加相反方向的外场会使一个磁电阻的阻值降低的同时另一个的阻值会随之增加,使两个磁电阻测量外场有相反的响应——一个阻值增加另一个阻值降低——这可以增加传感器的灵敏度,因此被称为“推挽式”桥式电路。
推挽半桥传感器的输出电压可以通过很多已知的方法进行测量,例如在V1和GND焊盘之间连接电压表,V1和GND之间的电位差(V1-GND)就是输出电压,其典型的输出曲线的模拟结果如图4所示。

右图是MTJ电桥的输出曲线为模拟信号,可以通过设置一个专用的ASIC芯片对模拟信号进行处理,可根据用途输出数字信号。
巨磁电阻效应的发现者法国科学家阿尔贝·费尔(Albert Fert)和德国科学家彼得·格林贝格尔(Peter Andreas Grünberg)由于其对现代磁记录和工业领域的巨大贡献而获得2007年诺贝尔物理学奖,作为GMR元件的下一代技术,TMR(MTJ)元件已完全取代GMR元件,被广泛应用于硬盘磁头领域。相信TMR磁传感技术将在工业、生物传感、磁性随机存储(Magnetic Random Access Memory,MRAM)等领域有极大的发展与贡献。
MEMS传感器2021年增长约16%,达到创纪录的159亿美元
laoguo 发表了文章 • 0 个评论 • 688 次浏览 • 2021-06-28 14:09
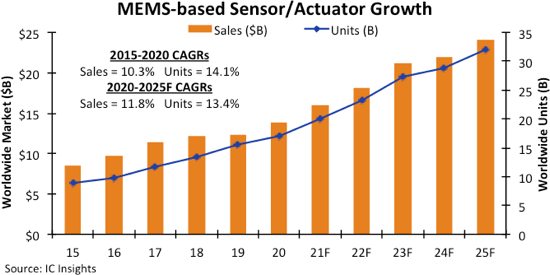
市调机构IC Insights《O-S-D(光电,传感器,和分立器件)Report 2021》在最新报告中预测了全球微机电系统 (MEMS)市场趋势。该机构预计,在2020年下半年全球半导体产业开始复苏后,采用MEMS技术制造的传感器和执行器在未来几年内将以两位数的高百分比增长。
IC Insights认为,基于MEMS的压力传感器、麦克风芯片、加速度计、陀螺仪设备和执行器的总销售额预计将每年以两位数的百分比增长,在2021年增长约16%,达到创纪录的159亿美元。
尽管2020年初,疫情的蔓延对全球各个产业带去巨大冲击,但2020年下半年开始,MEMS传感器/执行器产品开始复苏,并持续增长,这也离不开当时看到关键终端市场的稳定和复苏迹象后迅速开始补充库存MEMS制造商。
该报告还分析,从2020年至2025年,MEMS传感器和执行器市场规模预计将以11.8%的复合年增长率增长至241亿美元,出货量将以13.4%的复合年增长率增长至321亿颗。
这份长达350页的《O-S-D(光电,传感器,和分立器件)Report 2021》报告数据显示,2020年,在总价值为165亿美元的半导体传感器/执行器市场中,约有83%的市场价值来自采用MEMS技术的传感器/执行器。2020年全球出货的309亿颗半导体传感器和执行器中,约有55%采用MEMS技术。每年大约 44% 的基于 MEMS 的传感器和执行器的销售额来自汽车应用。
基于MEMS的压力传感器、麦克风、加速度计、陀螺仪等传感器和执行器的总市场规模预计将每年以两位数的百分比增长,至2024年,也就是下一次周期性经济放缓之时预计增长降至4%,随后2025年温和反弹9%。
2022年惯导系统全球市场将达 45 亿美元
laoguo 发表了文章 • 0 个评论 • 785 次浏览 • 2021-06-25 15:05
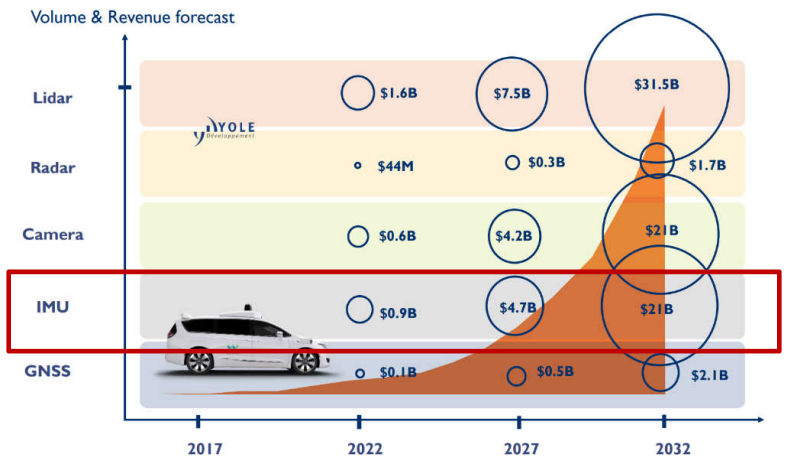
惯导系统的市场正起步,2022 年全球市场空间将达 45 亿美元,其中,车用高精度的惯性导航是随着智能驾驶的兴起新增的市场。
根据半导体/传感器研究机 构 Yole development 的估计,惯性传感器 IMU 的 2018 年的全球市场空间为 1.6 亿美元,到 2022 年将达 9 亿美元。
惯性导航传感器价格一般是惯性导航系统 的 1/5,由此测算惯导系统的全球市场空间在 2018 年为 8 亿美元,至 2022 年 为 45 亿美元,对应 2018-2022 年 CAGR 为 54%。
自动驾驶 IMU 市场规模 资料来源:Yole development,基业常青
目前,国内惯导系统研发尚处起步阶段。
美国国防部把从事惯性技术领域研究和开发的国家分为 4 个层次,中国 整体处于具备部分研发能力的第三梯队。
惯性技术领域研究的开发国家的 4 个层次 资料来源:基业常青
国内的惯性导航组合研发起步较晚,技术上与国外存在不小的差距。惯 性导航传感器的核心元器件是加速度传感器和陀螺仪,应用领域分为消费级、 工业级和汽车级、军工级和宇航级。各个领域中均是国外企业占据领先地位。
MEMS 惯性传感器研发、制造商一览表 资料来源:基业常青
全球市场:全球高性能的 MEMS 惯导主要掌握在以下几家企业手中: Honeywell、Analog Devices Inc、Sensonor、Silicon Sensing Systems 及 Systron Donner (QMEMS)。但面向武器装备和船舶为主,高精度,高成本,几乎全 线禁运,并且价格高昂,最便宜的 ADI 低端战术级精度价格>2 万元。
国内市场: 国内传统惯导技术源头包括航天科技 13 所、航天科工 33 所、 船舶 707 所、航空 618 所及兵器 214 所等。主要为军工企业,面向武器装 备为主,高精度,高成本,低产量,对民用市场不敏感。